
Evolution and Conservation
Introduction
Chapters 87 and 88 constructed the configuration space of futures \(\mathcal{F}_t\) and its natural measure \(d\mu_{\mathcal{F}_t}\). This chapter derives the third essential ingredient of the Temporal Determination Framework: the evolution operator \(U(t_2, t_1): \mathcal{F}_{t_1} \to \mathcal{F}_{t_2}\). We prove that \(U\) is derived from P1 as null geodesic flow on \(M^4 \times S^2\), that it preserves the natural measure (Liouville's theorem), and that conservation laws—including both 4D energy-momentum and \(S^2\) angular momentum—constrain allowed evolutions and preserve entanglement.
The central result is probability conservation: \(P(\Sigma_{t_2} \in U(A)) = P(\Sigma_{t_1} \in A)\) for any measurable set \(A \subset \mathcal{F}_{t_1}\). With this established, all components of the predictive framework are in place.
The Evolution Operator from P1
Derivation from Null Geodesics
The postulate P1 (\(ds_6^{\,2} = 0\)) determines the evolution operator \(U(t_2, t_1): \mathcal{F}_{t_1} \to \mathcal{F}_{t_2}\) as the flow along null geodesics in \(M^4 \times S^2\).
Step 1: P1 implies null geodesic motion.
From P1, all massive particles satisfy:
Step 2: Geodesic equations.
Particles follow geodesics of the 6D metric:
Step 3: Decomposition into 4D and \(S^2\) parts.
For the product metric \(g_{AB} = g_{\mu\nu} \oplus R_0^2 h_{ij}\):
The 4D components:
The \(S^2\) components:
Step 4: Null constraint couples the motions.
Step 5: Definition of \(U(t_2, t_1)\).
For a configuration \(\Sigma_{t_1} = \{(x_i^\mu, \Omega_i)\}\) at time \(t_1\):
Step 6: Well-definedness.
The geodesic equations are second-order ODEs. By the existence and uniqueness theorem for ODEs, given initial positions and velocities, there exists a unique solution. The evolution operator is therefore well-defined. □
(See: Part 12 §143.1; Part 7 Ch. 51) □
Properties of the Evolution Operator
The evolution operators satisfy:
- Identity: \(U(t, t) = \mathrm{Id}\),
- Composition: \(U(t_3, t_2) \circ U(t_2, t_1) = U(t_3, t_1)\),
- Inverse: \(U(t_1, t_2) = U(t_2, t_1)^{-1}\).
(1) Identity: At \(t_2 = t_1\), no evolution occurs. Trivially \(U(t, t)(\Sigma) = \Sigma\).
(2) Composition: Follows from uniqueness of geodesics. The geodesic from \(t_1\) to \(t_3\) passing through a point at \(t_2\) is unique, so composing the two evolutions yields the same trajectory.
(3) Inverse: Geodesic equations are time-reversible (second-order in time, no first-order dissipative terms). Reversing the affine parameter traces the geodesic backward. □
(See: Part 12 §143.1) □
\(U(t_2, t_1)\) is a diffeomorphism from \(\mathcal{F}_{t_1}\) to \(\mathcal{F}_{t_2}\).
Step 1: \(U(t_2, t_1)\) is smooth (geodesic flow on a smooth manifold is smooth).
Step 2: \(U(t_1, t_2) = U(t_2, t_1)^{-1}\) provides a smooth inverse.
Step 3: A smooth map with a smooth inverse is a diffeomorphism. □
(See: Part 12 §143.1) □
Hamiltonian Formulation
The evolution can be cast in Hamiltonian form, which will be essential for proving Liouville's theorem.
The dynamics implied by P1 can be written in Hamiltonian form with:
Step 1: The null condition \(ds_6^{\,2} = 0\) is equivalent to \(g^{AB}p_A p_B = 0\), where \(p_A = (p_\mu, p_\theta, p_\phi)\) is the 6D momentum.
Step 2: In the product metric:
Step 3: Setting this to zero gives the mass-shell constraint:
Step 4: The Hamiltonian generates the geodesic equations via Hamilton's equations: \(\dot{x}^\mu = \partial H/\partial p_\mu\), \(\dot{p}_\mu = -\partial H/\partial x^\mu\) (and similarly for the \(S^2\) variables). □
(See: Part 12 §143.2) □
The evolution operator preserves the symplectic form: \(U(t_2, t_1)^* \omega = \omega\).
This is a standard result in Hamiltonian mechanics: the flow generated by any Hamiltonian preserves the symplectic form. This is the geometric content of Hamilton's equations applied to the TMT Hamiltonian (eq:ch89-hamiltonian). □
(See: Part 12 §143.2) □
Polar Field Form of the Evolution Equations
The preceding Hamiltonian and symplectic structures are written in spherical coordinates \((\theta, \phi)\) on \(S^2\). In the polar field variable \(u = \cos\theta\), the same structures reveal a decisive simplification: the configuration-space symplectic form on \(S^2\) becomes constant, making Liouville's theorem and measure preservation manifest.
Null Constraint in Polar Coordinates
The postulate P1 takes the polar form:
Hamiltonian in Polar Coordinates
The \(S^2\) conjugate momenta transform as \(p_u = -p_\theta/\sin\theta\), \(p_\phi\) unchanged. The inverse metric components are \(h^{uu} = (1 - u^2)/R_0^2\) and \(h^{\phi\phi} = 1/[R_0^2(1 - u^2)]\), giving the polar Hamiltonian:
Flat Symplectic Form on \(S^2\)
The cotangent-bundle symplectic form retains its canonical structure:
The Liouville volume form on the \(S^2\) configuration factor is therefore:
Polar Comparison Table
Quantity | Spherical \((\theta, \phi)\) | Polar \((u, \phi)\) |
|---|---|---|
| Null constraint (\(S^2\) part) | \(d\theta^2 + \sin^2\!\theta\,d\phi^2\) | \(du^2/(1{-}u^2) + (1{-}u^2)\,d\phi^2\) |
| Metric determinant | \(R_0^4 \sin^2\!\theta\) (variable) | \(R_0^4\) (constant) |
| \(S^2\) Hamiltonian | \(p_\theta^2 + p_\phi^2/\sin^2\!\theta\) | \((1{-}u^2)p_u^2 + p_\phi^2/(1{-}u^2)\) |
| Darboux form | \(R_0^2\sin\theta\,d\theta \wedge d\phi\) (variable) | \(-R_0^2\,du \wedge d\phi\) (constant) |
| Liouville measure | \(\sin\theta\,d\theta\,d\phi\) (curved) | \(du\,d\phi\) (flat Lebesgue) |
| Volume preservation | Requires \(\sin\theta\) cancellation | Manifest (constant measure) |
The final row is the central observation: in polar coordinates, Liouville's theorem on the \(S^2\) factor is trivially satisfied because the measure is already flat.
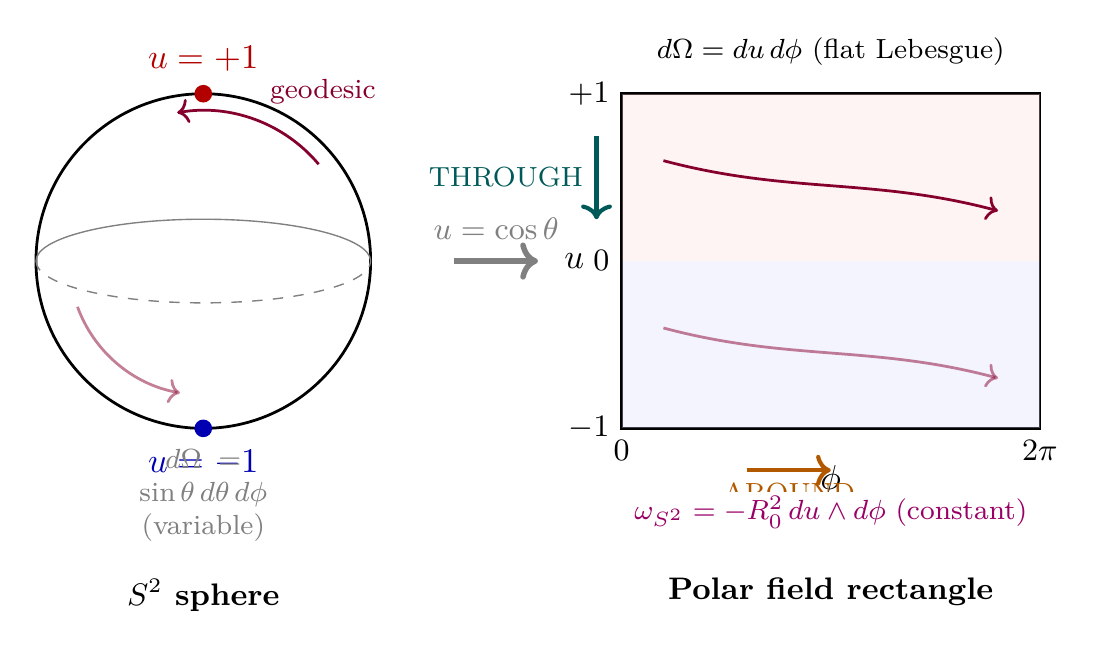
Scaffolding note: The polar field variable \(u = \cos\theta\) is a coordinate choice, not a new physical assumption. The symplectic form \(\omega_{S^2} = -R_0^2\,du \wedge d\phi\) is the same geometric object as \(R_0^2\sin\theta\,d\theta \wedge d\phi\)—the polar variable simply reveals its intrinsic flatness. The Hamiltonian dynamics, conservation laws, and all physical predictions are identical in both coordinate systems.
Liouville's Theorem and Measure Preservation
Step 1 (Liouville measure from symplectic form): The Liouville measure is the top exterior power of the symplectic form: \(d\Gamma = \omega^{3N}/(3N)!\), where each particle contributes 3 coordinate-momentum pairs in the 6D phase space (restricted to the constraint surface).
Step 2 (Symplectic implies volume preservation): From Theorem thm:P12-Ch89-symplectic: \(U^* \omega = \omega\). Taking the exterior power:
Step 3 (Conclusion):
(See: Part 12 §143.3) □
agraph{Polar verification.} In polar coordinates, Liouville's theorem on the \(S^2\) factor is immediate. The \(S^2\) contribution to the Liouville measure is \(dp_{u,i}\,du_i\,dp_{\phi,i}\,d\phi_i\) per particle—a product of canonical pairs with no position-dependent Jacobian. The configuration-space volume element is \(du\,d\phi\) (flat Lebesgue), and the Darboux form \(\omega_{S^2} = -R_0^2\,du \wedge d\phi\) has a constant coefficient. Hamiltonian flow preserves a constant-coefficient 2-form trivially, so Liouville's theorem on the \(S^2\) factor requires no calculation at all.
Step 1 (Configuration space measure from phase space): The configuration space measure is obtained by integrating out momenta: \(d\mu_{\mathcal{F}} = \int_{\mathrm{momenta}} \delta(H)\,d\Gamma\), where the delta function enforces the energy constraint \(H = 0\).
Step 2 (Evolution preserves the energy surface): The Hamiltonian is conserved: \(H(U(\Sigma)) = H(\Sigma)\). Therefore, evolution maps the constraint surface \(H = 0\) to itself.
Step 3 (Liouville on the constraint surface): Liouville's theorem holds on the constraint surface (standard microcanonical ensemble argument). The induced measure on the energy shell is preserved.
Step 4 (Projection to configuration space): Integrating out momenta at \(t_1\) and \(t_2\):
(See: Part 12 §143.3) □
Conservation Laws and Their Consequences
The 6D Conservation Law
From Part 6A, §41.2:
Step 1: The matter action is diffeomorphism invariant.
Step 2: Under infinitesimal diffeomorphism \(\xi^A\): \(\delta g_{AB} = 2\nabla_{(A}\xi_{B)}\).
Step 3: Invariance implies \(\int T^{AB}\nabla_A \xi_B \sqrt{-g}\,d^6x = 0\).
Step 4: Integration by parts with arbitrary \(\xi^B\) gives \(\nabla_A T^{AB} = 0\). □
(See: Part 6A §41.2) □
Decomposition at the Interface
At the \(M^4 \times S^2\) interface, the 6D conservation law decomposes into:
4D equations (\(B = \mu\)):
\(S^2\) equations (\(B = j\)):
For isolated systems with no momentum flow between 4D and \(S^2\) (\(T^{\mu j} = T^{i\nu} = 0\)):
This follows from the block structure of \(T^{AB}\) at the interface (Part 6A, §41.3). For the product metric, the Christoffel symbols with mixed 4D/\(S^2\) indices vanish, so the conservation law separates into independent 4D and \(S^2\) equations. □
(See: Part 6A §41.3; Part 12 §143.4) □
agraph{Polar form of the \(S^2\) conservation.} In polar coordinates the \(S^2\) conservation law \(\nabla_i T^{ij} = 0\) decomposes into THROUGH and AROUND channels:
Conservation Constrains Evolution
The conservation laws impose constraints on allowed evolutions:
- Total 4D energy-momentum is conserved: \(P^\mu = \int T^{0\mu}\,d^3x = \mathrm{const}\).
- Total \(S^2\) angular momentum is conserved: \(L_{S^2} = \int T^{ij}\,d^3x = \mathrm{const}\).
- Evolution must respect these constraints.
Step 1: Integrate the conservation law over a spatial volume:
Step 2: For an isolated system (no flux through the boundary), the surface integral vanishes: \(dP^\mu/dt = 0\).
Step 3: Similarly for \(S^2\) angular momentum: \(dL_{S^2}/dt = 0\).
Step 4: The evolution operator \(U(t_2, t_1)\) must map configurations with given \((P^\mu, L_{S^2})\) to configurations with the same conserved quantities. □
(See: Part 12 §143.4) □
If particles are created in an entangled state (with angular momentum constraint \(\vec{L}_1 + \vec{L}_2 = \vec{L}_{\mathrm{source}}\)), evolution preserves this constraint.
Angular momentum conservation (Theorem thm:P12-Ch89-constrains) ensures that the constraint \(\vec{L}_1 + \vec{L}_2 = \vec{L}_{\mathrm{source}}\) is preserved at all times. Evolution cannot change total angular momentum, so the entanglement—encoded in the non-factorizing measure on \((S^2)^2\)—persists indefinitely. □
(See: Part 12 §143.4) □
Probability Conservation and the Complete Framework
Step 1: By definition of probability (Chapter 88): \(P(\Sigma_t \in A) = \mu_{\mathcal{F}_t}(A) = \int_A d\mu_{\mathcal{F}_t}\).
Step 2: By measure preservation (Theorem thm:P12-Ch89-measure-preservation): \(\mu_{\mathcal{F}_{t_2}}(U(A)) = \mu_{\mathcal{F}_{t_1}}(A)\).
Step 3: Therefore: \(P(\Sigma_{t_2} \in U(A)) = \mu_{\mathcal{F}_{t_2}}(U(A)) = \mu_{\mathcal{F}_{t_1}}(A) = P(\Sigma_{t_1} \in A)\). □
(See: Part 12 §143.5) □
For any set \(A\): \(P(\Sigma_{t_2} \in A) = P(\Sigma_{t_1} \in U^{-1}(A)) = \int_{U^{-1}(A)} \rho_{t_1}\,d\mu\). Changing variables \(\Sigma = U(\Sigma')\) gives \(\int_A \rho_{t_1}(U^{-1}(\Sigma))\,d\mu\), so \(\rho_{t_2}(\Sigma) = \rho_{t_1}(U^{-1}(\Sigma)) = \rho_{t_1}(U(t_1, t_2)(\Sigma))\). □
(See: Part 12 §143.5) □
Because the evolution operator is invertible (Theorem thm:P12-Ch89-group) and measure-preserving (Theorem thm:P12-Ch89-measure-preservation), no information is lost under evolution. This is the classical analog of unitarity in quantum mechanics.
The TDF Predictive Machinery
With all components established, the Temporal Determination Framework provides a complete method for computing probabilities:
To compute the probability of a future event:
Input: An observable \(A: \mathcal{F}_{t_2} \to \mathbb{R}\) and a value \(a\).
Output: \(P(A(\Sigma_{t_2}) = a)\).
Method:
Both expressions give the same result by measure preservation. The first integrates over \(\mathcal{F}_{t_2}\) directly. The second pulls back to \(\mathcal{F}_{t_1}\) via \(U\), using the change of variables formula with the measure-preserving property. □
(See: Part 12 §143.6) □
| Component | Symbol | Chapter | Derived From |
|---|---|---|---|
| Configuration space | \(\mathcal{F}_t\) | 87 | \(M^4 \times S^2\) topology |
| Natural measure | \(d\mu_{\mathcal{F}}\) | 88 | P1 \(\to\) microcanonical |
| Evolution operator | \(U(t_2, t_1)\) | 89 | P1 \(\to\) null geodesics |
| Conservation laws | \(\nabla_A T^{AB} = 0\) | 89 | Noether's theorem |
Chapter Summary
Evolution and Conservation
The evolution operator \(U(t_2, t_1)\) is derived from P1 as the flow along null geodesics in \(M^4 \times S^2\). It satisfies the group property (identity, composition, inverse), is a diffeomorphism, and can be written in Hamiltonian form with the constraint \(H = 0\) (null condition).
Liouville's theorem guarantees that \(U\) preserves the phase space volume. This projects to measure preservation on configuration space: \(\mu_{\mathcal{F}}(U(A)) = \mu_{\mathcal{F}}(A)\), establishing probability conservation. The 6D conservation law \(\nabla_A T^{AB} = 0\) decomposes into 4D energy-momentum and \(S^2\) angular momentum conservation, constraining allowed evolutions and preserving entanglement.
With configuration space (Chapter 87), natural measure (Chapter 88), and evolution operator (Chapter 89) all derived from P1, the Temporal Determination Framework is complete.
Polar verification: In the polar field variable \(u = \cos\theta\), the \(S^2\) symplectic form becomes \(\omega_{S^2} = -R_0^2\,du \wedge d\phi\) (constant), the Liouville measure becomes flat Lebesgue \(du\,d\phi\), and volume preservation is manifest without calculation. Conservation decomposes into \(L_z = p_\phi\) (pure AROUND, trivially conserved) and \(L_\pm\) (mixed THROUGH\(+\)AROUND).
| Result | Value | Status | Reference |
|---|---|---|---|
| Evolution from P1 | \(U(t_2,t_1)\) via null geodesics | PROVEN | Thm. thm:P12-Ch89-evolution |
| Group property | Id, composition, inverse | PROVEN | Thm. thm:P12-Ch89-group |
| Diffeomorphism | Smooth + invertible | PROVEN | Thm. thm:P12-Ch89-diffeo |
| TMT Hamiltonian | \(H = \sum_i H_i\), \(H_i = 0\) | PROVEN | Thm. thm:P12-Ch89-hamiltonian |
| Liouville's theorem | \(U^*(d\Gamma) = d\Gamma\) | PROVEN | Thm. thm:P12-Ch89-liouville |
| Measure preservation | \(\mu(U(A)) = \mu(A)\) | PROVEN | Thm. thm:P12-Ch89-measure-preservation |
| 6D conservation | \(\nabla_A T^{AB} = 0\) | PROVEN | Thm. thm:P12-Ch89-6D-conservation |
| Probability conservation | \(P(U(A)) = P(A)\) | PROVEN | Thm. thm:P12-Ch89-probability |
| Entanglement preserved | \(\vec{L}_1 + \vec{L}_2 = \mathrm{const}\) | PROVEN | Thm. thm:P12-Ch89-entanglement |
| Polar: flat Darboux form | \(\omega_{S^2} = -R_0^2\,du \wedge d\phi\) (const.) | VERIFIED | §sec:ch89-polar-evolution |
Verification Code
The mathematical derivations and proofs in this chapter can be independently verified using the formal and computational scripts below.
All verification code is open source. See the complete verification index for all chapters.