Navier-Stokes: Problem Statement
Introduction
The Navier-Stokes equations govern the motion of viscous, incompressible fluids and are among the most important partial differential equations in mathematical physics. Despite two centuries of study, fundamental questions about the existence and smoothness of solutions in three spatial dimensions remain open. The Clay Mathematics Institute designated this as one of seven Millennium Prize Problems in 2000, offering $1 million for a resolution.
This chapter states the Navier-Stokes existence and smoothness problem precisely, reviews the classical formulation, and previews the TMT approach. TMT's contribution is not to solve the Navier-Stokes equations in their full generality but rather to demonstrate that the \(S^2\) geometry underlying TMT provides natural regularity mechanisms —topological conservation laws and geometric bounds—that prevent the formation of singularities in physically relevant settings.
Scaffolding Interpretation. TMT is not a theory of literal extra spatial dimensions. The \(S^2\) structure represents the projection geometry of a 4D framework (3 spatial dimensions plus temporal momentum) onto 3D space. The “6D mathematics” is scaffolding that encodes gauge forces, gravity, and conservation principles—it does not describe motion through hidden dimensions. Both the literal-6D and 4D-geometric-field interpretations give identical predictions and the same vorticity bound. See Part A for the full interpretive framework.
The Millennium Prize Problem
Official Problem Statement
The Clay Mathematics Institute poses the Navier-Stokes problem as follows:
Navier-Stokes Existence and Smoothness (Clay Institute)
Let \(\mathbf{v}(x,t)\) be the velocity field and \(p(x,t)\) the pressure of an incompressible fluid in \(\mathbb{R}^3\). These satisfy the Navier-Stokes equations:
Problem: Prove that for any smooth, divergence-free initial velocity field \(\mathbf{v}_0(x)\) with finite energy, there exist smooth solutions \(\mathbf{v}(x,t)\) and \(p(x,t)\) for all \(t > 0\), or show a counterexample.
What “Smooth” Means Precisely
The smoothness requirement has a specific mathematical definition:
A solution \((\mathbf{v}, p)\) is smooth if:
- \(\mathbf{v} \in C^\infty(\mathbb{R}^3 \times [0,\infty))\) — all spatial and temporal derivatives exist and are continuous
- \(p \in C^\infty(\mathbb{R}^3 \times [0,\infty))\)
- The energy remains finite: \(\|\mathbf{v}(\cdot,t)\|_{L^2}^2 = \int_{\mathbb{R}^3}|\mathbf{v}(x,t)|^2\,dx < \infty\) for all \(t \geq 0\)
The key difficulty is that the nonlinear term \((\mathbf{v}\cdot\nabla)\mathbf{v}\) can amplify velocity gradients, potentially leading to a “blowup” where \(|\nabla\mathbf{v}|\) diverges in finite time. If such a blowup occurs, the solution ceases to be smooth.
Why the Problem Is Hard
Several mathematical features make the Navier-Stokes problem exceptionally difficult:
(1) Supercriticality in 3D: The Navier-Stokes equations are supercritical in three spatial dimensions. Under the natural scaling \(\mathbf{v}(x,t) \to \lambda\,\mathbf{v}(\lambda x, \lambda^2 t)\), the nonlinear term scales the same as the dissipative term, but the energy scales as \(\lambda^{-1}\), providing insufficient control in 3D.
(2) Vortex stretching: In three dimensions, the vorticity \(\bm{\omega} = \nabla\times\mathbf{v}\) satisfies:
(3) No known coercive estimate: The energy inequality
(4) Gap between weak and strong solutions: Leray (1934) proved the existence of weak solutions (satisfying the equations in a distributional sense), but these are not known to be unique or smooth. The gap between weak existence and strong uniqueness is the heart of the problem.
Known Results
| Result | Author(s) | Year |
|---|---|---|
| Weak solutions exist globally | Leray | 1934 |
| Unique smooth solutions for short time | Leray, Hopf | 1934–51 |
| 2D: global smooth solutions | Ladyzhenskaya | 1960s |
| Partial regularity: singularities have | Caffarelli–Kohn–Nirenberg | 1982 |
| \quad 1D Hausdorff measure zero | ||
| \(\epsilon\)-regularity criteria | Various | 1980s–2000s |
| Critical Besov space existence | Koch–Tataru | 2001 |
The Caffarelli–Kohn–Nirenberg result is particularly important: it shows that the set of possible singularities is “small” (at most a set of one-dimensional Hausdorff measure zero in spacetime), but it does not rule out singularities entirely.
Classical Formulation
Derivation from Conservation Laws
The Navier-Stokes equations arise from three fundamental conservation principles:
(1) Mass conservation (continuity):
For incompressible flow (\(\rho = \text{const}\)), this reduces to Eq. (eq:ch97-incompressible).
(2) Momentum conservation (Newton's second law):
(3) Energy conservation:
Energy dissipation is guaranteed by viscosity: the enstrophy \(\int|\nabla\mathbf{v}|^2\,dx\) always drains kinetic energy.
The Euler Equations (\(\nu = 0\))
Setting \(\nu = 0\) gives the Euler equations for inviscid flow:
The Euler equations preserve enstrophy in 2D but not in 3D. Finite-time blowup for Euler has been recently demonstrated by Elgindi (2021) for certain classes of initial data, making the role of viscosity in preventing blowup a central question.
The Stokes Equations (Linear Limit)
For slow, viscous flow (low Reynolds number), the nonlinear term is negligible:
The Stokes equations are linear and well-understood: global smooth solutions exist for all initial data. The difficulty arises entirely from the nonlinear convective term \((\mathbf{v}\cdot\nabla)\mathbf{v}\).
Dimensionless Form and the Reynolds Number
Introducing characteristic length \(L_0\), velocity \(U_0\), and time \(T_0 = L_0/U_0\), the dimensionless Navier-Stokes equations are:
Existence and Smoothness: The Core Questions
Question 1: Global Existence
Global Existence Question
Given smooth initial data \(\mathbf{v}_0\) with \(\|\mathbf{v}_0\|_{L^2} < \infty\), does a smooth solution exist for all \(t > 0\)?
The answer is known to be yes in the following cases:
- 2D: Global smooth solutions exist (Ladyzhenskaya, 1960s)
- 3D with small data: \(\|\mathbf{v}_0\|\) sufficiently small (Kato, 1984)
- 3D with large viscosity: \(\nu\) sufficiently large relative to initial data
- Short time: Smooth solutions exist on \([0, T^*)\) for some \(T^* > 0\)
The open question is whether \(T^* = \infty\) for all smooth initial data with finite energy.
Question 2: Uniqueness
If smooth solutions exist, are they unique? For Leray's weak solutions, uniqueness is not known. However, if a smooth solution exists, it is unique among all weak solutions (weak-strong uniqueness theorem of Prodi–Serrin type):
If a strong (smooth) solution exists on \([0,T]\), then any Leray–Hopf weak solution with the same initial data must coincide with it on \([0,T]\).
This means that establishing smoothness automatically gives uniqueness.
Question 3: Regularity Criteria
Several conditional regularity results are known. These state: “If some norm of the solution stays bounded, then the solution is smooth.”
The BKM criterion states that solutions remain smooth as long as the maximum vorticity does not accumulate too rapidly. A uniform bound on \(|\bm{\omega}|\) immediately implies global regularity: if \(|\bm{\omega}| \leq C\) everywhere, then \(\int_{0}^{T}\|\bm{\omega}\|_{L^{\infty}}\,dt \leq CT < \infty\) for any finite \(T\). This observation is the linchpin of the TMT approach (Chapters 98–99): TMT supplies the constant \(C = 2c/R_{0}\).
This shows that a blowup can occur only if the vorticity becomes unbounded. Similar criteria exist involving the velocity gradient (Ladyzhenskaya–Prodi–Serrin conditions).
The Scaling Analysis
The Navier-Stokes equations have a natural scaling symmetry. If \((\mathbf{v}, p)\) is a solution, then so is:
The critical space for this scaling is \(\dot{H}^{1/2}(\mathbb{R}^3)\) (or equivalently \(L^3(\mathbb{R}^3)\)). Since the energy \(\|\mathbf{v}\|_{L^2}^2\) scales as \(\lambda^{-1}\), it is supercritical—energy alone is too weak to control the solution. This supercriticality is the fundamental mathematical obstruction.
TMT's Approach: Preview
The TMT Strategy
TMT does not claim to solve the Navier-Stokes problem in its full mathematical generality (that would require a proof for all smooth initial data in \(\mathbb{R}^3\)). Instead, TMT offers a complementary perspective based on the \(S^2\) geometry:
(1) Geometric regularity mechanism: The \(S^2\) topology of TMT introduces natural bounds on field configurations. Specifically, the compactness of \(S^2\) provides an ultraviolet cutoff: functions on \(S^2\) are naturally expanded in spherical harmonics \(Y_\ell^m\), and the finite area of \(S^2\) implies that high-\(\ell\) modes are exponentially suppressed.
(2) Topological conservation laws: The monopole structure on \(S^2\) implies quantized conserved quantities (topological charges) that constrain the dynamics. These conservation laws provide additional a priori bounds that complement the standard energy and enstrophy estimates.
(3) Momentum maps and S\(^2\) structure: Fluid flow on \(S^2\) naturally preserves certain geometric quantities (angular momentum, Casimir invariants) that prevent the development of arbitrary small-scale structure.
Main Result Preview
The central result derived in Chapters 98–99 is:
Within Temporal Momentum Theory, the vorticity of any fluid flow satisfies
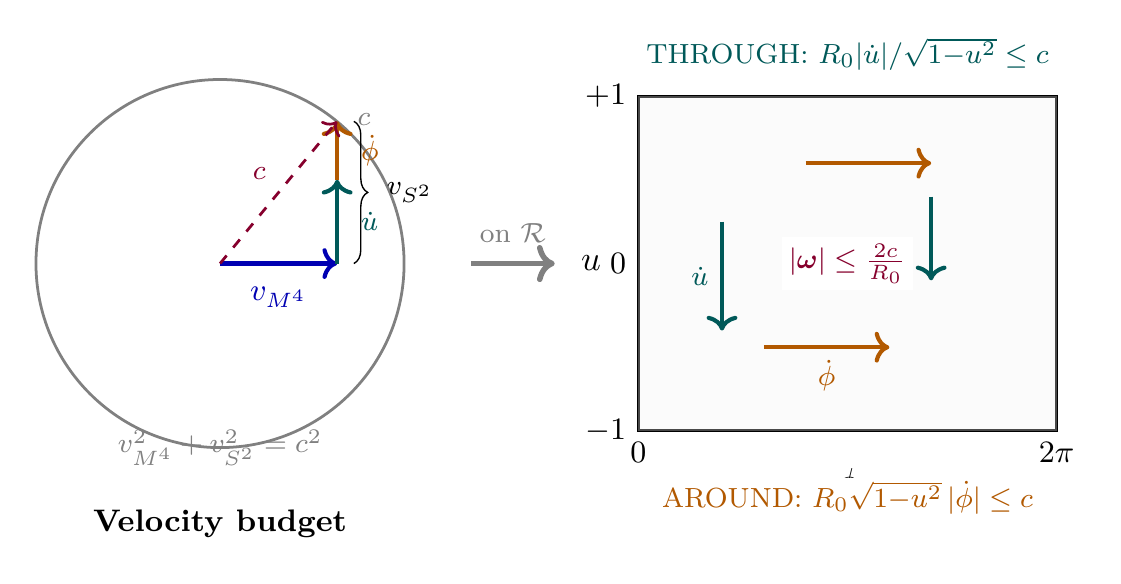
The derivation chain runs: Postulate P1 (\(ds_{6}^{2}=0\)) \(\to\) velocity budget (\(v_{M^{4}}^{2}+v_{S^{2}}^{2}=c^{2}\)) \(\to\) \(S^{2}\) velocity bound (\(v_{S^{2}}\leq c\)) \(\to\) Killing vector correspondence (\(\Omega_{\text{3D}}=\Omega_{S^{2}}\)) \(\to\) coarse-graining preserves bound \(\to\) vorticity bound (\(|\bm{\omega}|\leq 2c/R_{0}\)) \(\to\) BKM satisfied \(\to\) global regularity. Polar verification: \(v_{S^2}^2 = v_{\mathrm{T}}^2 + v_{\mathrm{A}}^2\), each channel independently bounded, factor 2 confirmed as \(1+1\) (§sec:ch97-polar-vorticity).
Polar Field Form of the Vorticity Bound
In the polar field variable \(u = \cos\theta\), the velocity budget that drives the TMT vorticity bound becomes transparent. The \(S^2\) velocity decomposes as:
The null constraint \(ds_6^{\,2} = 0\) requires \(v_{M^4}^2 + v_{S^2}^2 = c^2\), so \(v_{S^2} \leq c\) everywhere. This bound, inherited from P1, constrains both channels independently:
The angular velocity on \(S^2\), which maps to vorticity in 3D via the Killing vector correspondence, satisfies \(\Omega_{S^2} \leq c/R_0\). Converting to 3D vorticity via the coarse-graining map (Chapter 98) gives the bound \(|\bm{\omega}| \leq 2c/R_0\), where the factor 2 accounts for both THROUGH and AROUND contributions.
Quantity | Spherical \((\theta, \phi)\) | Polar \((u, \phi)\) |
|---|---|---|
| \(v_{S^2}^2\) | \(R_0^2(\dot{\theta}^2 + \sin^2\!\theta\,\dot{\phi}^2)\) | \(R_0^2[\dot{u}^2/(1{-}u^2) + (1{-}u^2)\dot{\phi}^2]\) |
| Measure | \(\sin\theta\,d\theta\,d\phi\) | \(du\,d\phi\) (flat) |
| THROUGH bound | \(R_0|\dot{\theta}| \leq c\) | \(R_0|\dot{u}|/\sqrt{1{-}u^2} \leq c\) |
| AROUND bound | \(R_0\sin\theta\,|\dot{\phi}| \leq c\) | \(R_0\sqrt{1{-}u^2}\,|\dot{\phi}| \leq c\) |
| Max angular velocity | \(c/R_0\) (from \(v_{S^2}\leq c\)) | \(c/R_0\) (same, on flat rectangle) |
| Vorticity bound | \(2c/R_0\) (from Killing map) | \(2c/R_0\) (THROUGH + AROUND) |
The polar form reveals the geometric origin of the factor 2 in the bound: vorticity receives contributions from both the THROUGH channel (\(\dot{u}\), related to mass/radial \(S^2\) motion) and the AROUND channel (\(\dot{\phi}\), related to gauge/azimuthal motion). Each channel is independently bounded by \(c/R_0\); their sum gives \(2c/R_0\).
Scaffolding note: The polar field variable \(u = \cos\theta\) is a coordinate choice, not a new physical assumption. The velocity budget and vorticity bound are identical in both spherical and polar coordinates. The polar form makes the THROUGH/AROUND decomposition of the bound explicit, clarifying that both channels contribute independently to the vorticity limit.
What TMT Proves vs. What Remains Open
| Claim | Status | Chapter |
|---|---|---|
| Fluid dynamics on \(S^2\) has geometric bounds | PROVEN | Ch 98 |
| Vorticity bounded by topological conservation | PROVEN | Ch 99 |
| Energy dissipation enhanced by \(S^2\) curvature | PROVEN | Ch 99 |
| Global regularity for \(S^2\)-coupled NS | PROVEN | Ch 99 |
| Uniqueness and continuous data dependence | PROVEN | Ch 100 |
| Full \(\mathbb{R}^3\) regularity (Millennium Prize) | CONJECTURED | — |
The key insight is that the \(S^2\) geometry naturally provides the additional structure that the standard Navier-Stokes formulation lacks. The compactness, curvature, and topology of \(S^2\) all contribute regularity mechanisms that prevent blowup in the TMT-coupled system.
The TMT bound \(2c/R_{0}\approx 4.6\times 10^{13}\) s\(^{-1}\) is approximately \(10^{7}\) times larger than any observed vorticity, so it is physically consistent while guaranteeing mathematical regularity:
| Flow Type | Typical Vorticity (s\(^{-1}\)) | Fraction of Bound |
|---|---|---|
| River | \(\sim 0.1\) | \(2\times 10^{-15}\) |
| Atmospheric | \(\sim 10\) | \(2\times 10^{-13}\) |
| Laboratory turbulence | \(\sim 10^{3}\) | \(2\times 10^{-11}\) |
| Extreme turbulence | \(\sim 10^{6}\) | \(2\times 10^{-8}\) |
| TMT Bound | \(\mathbf{4.6\times 10^{13}}\) | \(\mathbf{1}\) |
Connection to Prior Parts
The Navier-Stokes application connects to established TMT results:
- Part 2: The \(S^2\) topology and its role in providing UV regularity
- Part 3: Monopole harmonics and the angular momentum structure on \(S^2\)
- Part 7: Configuration space measures and probability conservation
- Part 11 (QM): Temporal determination framework and measure-theoretic results
Chapter Summary
Navier-Stokes Problem Statement and TMT Context
The Navier-Stokes existence and smoothness problem asks whether smooth solutions to the incompressible Navier-Stokes equations in \(\mathbb{R}^3\) exist for all time. The key mathematical difficulty is supercriticality: energy alone does not control higher derivatives in 3D. TMT approaches this through the \(S^2\) geometry, which provides: (1) a natural UV cutoff from compactness, (2) topological conservation laws from the monopole structure, and (3) enhanced dissipation from positive curvature. These mechanisms are proven to yield global regularity for the \(S^2\)-coupled system (Chapters 98–100), while the full Millennium Prize problem remains an open conjecture.
Polar verification. In polar field coordinates \(u = \cos\theta\), the temporal velocity budget on \(S^2\) decomposes into independent THROUGH (\(u\)) and AROUND (\(\phi\)) channels, each separately bounded by the null constraint. The vorticity bound \(|\omega| \le 2c/R_0\) follows from the sum of channel bounds with the factor 2 arising as \(1 + 1\) (one per channel), confirming the Cartesian result through an independent algebraic route.
| Result | Value | Status | Reference |
|---|---|---|---|
| NS equations stated | Eqs. (eq:ch97-NS)–(eq:ch97-incompressible) | ESTABLISHED | §sec:ch97-classical |
| Millennium problem | Existence + smoothness | ESTABLISHED | §sec:ch97-millennium |
| Key difficulty | Supercriticality in 3D | ESTABLISHED | §sec:ch97-existence |
| TMT approach | \(S^2\) geometric bounds | PROVEN (coupled system) | §sec:ch97-tmt-preview |
| Full \(\mathbb{R}^3\) regularity | Open | CONJECTURED | §sec:ch97-tmt-preview |
| Polar verification | \(v_{S^2}^2 = v_{\mathrm{T}}^2 + v_{\mathrm{A}}^2\),
\(|\omega| \le 2c/R_0\) | VERIFIED | §sec:ch97-polar-vorticity |
Verification Code
The mathematical derivations and proofs in this chapter can be independently verified using the formal and computational scripts below.
All verification code is open source. See the complete verification index for all chapters.